Problem
The is no open source tool that calculates thrust for DC rotors of drones for a variety of inputs.
Requirements
Handle various inputs and calculate the thrust for n DC rotors.
Code Documentation
Dependencies
These dependencies are not specified in the requirements because they needed to be installed on the system itselfs.
- For displaying the uml diagrams in the documentation install graphviz and asciidoctor-diagram.
For Linux:
apt install graphviz
gem install asciidoctor-diagramDesign
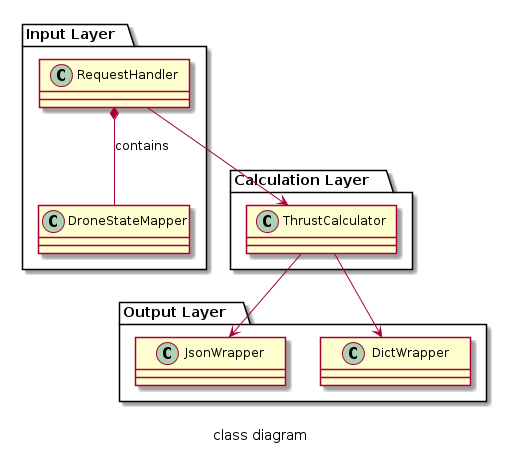
Architecture
This describes the architecture of the project with it’s different layers, but unlike convention it will also describe the interface due to simplicity of the project.
Architecture Type
This will be implemented as layer architecture. This is useful as we’ll have a well defined input and a even more defined output.
|
Important
|
This is not a formal uml diagram but a visualization of the structure. |
Layers
Layer Components
Input Layer
Calculation Layer
Output Layer
Dependency Graph
